First CONRO prototypes
Permission to use these images and movies is granted free of charge as long as the
credit line "USC Information Sciences Institute" is included.
10/12/98
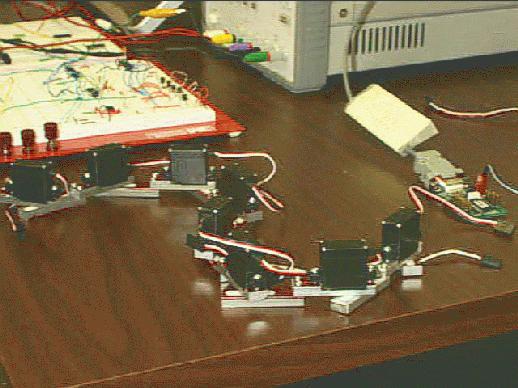
The first prototype of the CONRO project is ready. This robot has
8 modules, each one with one degree of freedom (yaw). The actuators
are RC servo motors that are controlled from a PC running under Linux.
Additional circuitry that allows the robot to "connect" its two extremes
will be installed shortly. The mechanical design was made by Wei-Min based
on the general ideas proposed by Peter and Wei-Min about reconfigurable
spider-links.
11/17/98
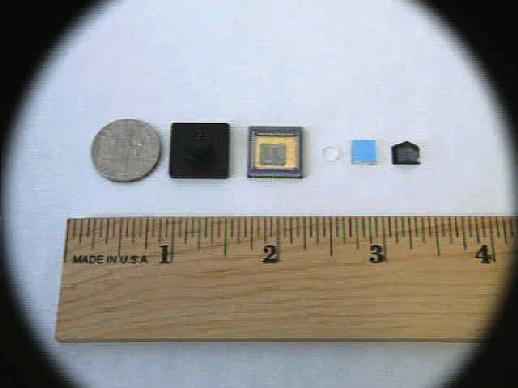
The first prototype of the camera that the conro robot will use. This camera,
designed by Alberto Behar, uses a CMOS sensor from VLSI technologies. In
the image we show, from left to right, a dime, the camera, the CMOS chip
that the camera sits on, the lens of the camera, a first-surface flat mirror
and a first-surface prism. The mirrors will be use to allow non-frontal
acquisition of the image. The final camera will use only the bare die of
the chip.
Simulation avi (341 K), mov
(307 K), mpg (386 K).
Implementation avi (795 K),
mov (2.1 Mb), mpg
(1.0 Mb).
Both avi (2.3 Mb), mov
(2.4 Mb), mpg(3.0 Mb) .
Simulation avi (1.1 Mb),
mov (524 K), mpg
(471 K).
Implementation avi (1.7 Mb),
mov (4.3 Mb), mpg
(1.8 Mb).
Both avi (2.8 Mb), mov
(2.7 Mb), mpg (4.0 Mb) .
12/01/98
These videos show two different gaits achieved by CONRO. There are two
movies per gait. The first movie shows the computer simulation envisioned
last Aug. The second movie shows the corresponding implementation using
the prototype. The first gait emulates the motion of a military tank. The
second gait uses a travelling wave to advance in an inch-worm fashion.
Andres is responsible for the smooth control of the robot (or the lack
thereof).
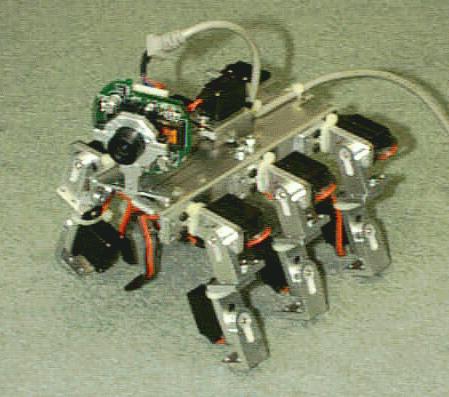
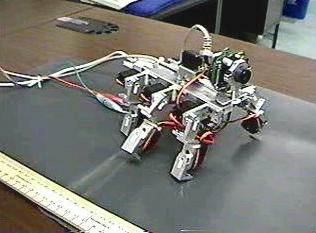
12/10/98
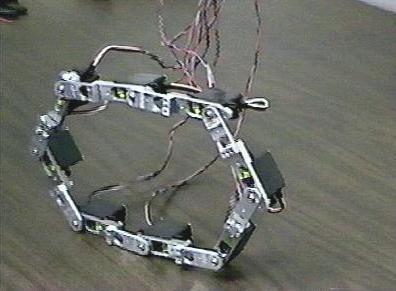
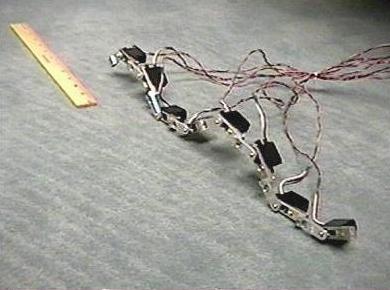
A working prototype of a miniature hexapod built using CONRO spider-links.
Each leg has two servo-motors that provide yaw and pitch motion to the
legs. The little robot has an on-board camera for surveying and panning
of the scene. The design and construction of the hexapod were made by Andres,
Bob and Wei-Min based on ideas proposed by Peter and Wei-Min.


12/10/98
Ramesh working on the prototype of the board used to control the snake
CONRO prototype. This board handles the control of the servos and drives
the infrared receivers and transmitters used in snake reconfiguration,
e.g., the snake uses these signals for docking. The board was designed
by Andres and Ramesh but it was build by Ramesh alone so he is to blame
if it blows up in our faces. The schematics of the version 1 of the
board are available.
Implementation avi (19.7 Mb),
mov (18.4 Mb), mpg
(8.6 Mb).
01/10/99
This video shows the hexapod moving forward, turning left, right and backwards.
Andres is responsible for the smooth control of the robot (or the lack
thereof).

Simulation avi (2.4 Mb), mov
(2.4 Mb), mpg (2.4 Mb).
Implementation mov (10.4 Mb), mpg
(7.7 Mb).
Both mov
(6.3 Mb), mpg(4.4 Mb) .
03/29/99
The videos of the first docking of the snake prototype.
The first movie shows the computer simulation envisioned
last Aug. The second movie shows the corresponding implementation using
the prototype. The third movie shows both simulation and implementation.
Andres was responsible for the docking algorithm.
[home]
[Project Information]
[Related Information]
[1st Prototype]
[2nd Prototype (Hardware)]
[2nd Prototype (Software-Hormones)]
[2nd Prototype (Software-Remote host)]
[68HC12-based board]
Please, let us know of any problems that you find viewing these pages
by mailing to the CONRO Webmaster .
